Join devRant
Do all the things like
++ or -- rants, post your own rants, comment on others' rants and build your customized dev avatar
Sign Up
Pipeless API

From the creators of devRant, Pipeless lets you power real-time personalized recommendations and activity feeds using a simple API
Learn More
-
Looking for a job as a deveoper be like:
Job title: car driver
Job requirements: professional skills in driving normal- and heavy-freight cars, buses and trucks, trolley buses, trams, subways, tractors, shovel diggers, contemporary light and heavy tanks currently in use by NATO countries.
Skills in rally and extreme driving are obligatory!
Formula-1 driving experience is a plus.
Knowledge and experience in repairing of piston and rotor/Wankel engines, automatic and manual transmissions, ignition systems, board computer, ABS, ABD, GPS and car-audio systems by world-known manufacturers - obligatory!
Experience with car-painting and tinsmith tasks is a plus.
The applicants must have certificates by BMW, General Motors and Bosch, but not older than two years.
Compensation: $15-$20/hour, depends on the interview result.
Education requirements: Bachelor's Degree of Engineering.43 -
That time I joined the robotics club and made the pid loop for the robot was one of my favorite projects. I learned ROS, and I created the entire chain of software and hardware to control six motors. That one project set up my experience for the next 4 years and led to a few jobs. I miss robotics.
 5
5 -
! Rant
Today's project, turning my diy convencional milling machine into automátic.
Status: it works.
Features: motors are to slow.
Solution: need better motors. 10
10 -
!dev
Just went to the pet asylum to look for a cat. There was a shy black one (eh, maybe not a good first but Moar Blacker, Moar Better 😋) and a black and white one which was very open towards me.
Probably I'll get the latter, and build some food, water and litter dispenser systems for it with motors and my esp8266 boards 🙂
The lady who was volunteering there and showed me around had an interesting story though.
Apparently both of those aforementioned cats were wild cats (so they don't come from a proper household or anything). Except that black and white one which apparently came from some rather retarded people.. think average Facebook user.
According to her those previous owners came there with 2 cats including the black and white one as "extremely wild, we found them in the forest, put them in cages (because everyone carries cat cages in their car every day, right?) and brought them here". Nice excuse for average Facebook user level of retard I have to say 😜 but it's not very waterproof, you know?
But on average the people that they get there are even worse than that.. some get a great initial meeting with a cat, but then leave them there because they don't like the stripes on a paw or something stupid like that. As she put it: "you're not fitting pants in a clothing shop, are you?! 😑"
Had to try hard to not burst out in laughter from that description 😂
Point is, the average customers there are awful.. apparently she was very grateful to have a rather down-to-earth customer like me and my home supervisor (who helpfully drove me there 🙂) for once. So terrible clients.. they're everywhere!
It really taught me to be mindful of the hardships of people in any profession who deal with clients.18 -
!rant
Four hours of work.
You think you write spaghetti code? I write spaghetti wires.
H-Bridge dual motor tester for stepper motors.
Speed is controled by pot.
H-bride are L293D.
My third board, and the first that won't go to the trash.
Question. With the baterry off the motor continues spinning with the 5v from arduino.
My question is, is the L293D suposed to do that? Or do I have a short circuit somewhere that is giving power to the motor? Meaning it can burn the arduino.
Runs a 12v stepper from a CD-Rom driver perfectly at 5v from the arduino and actually starts to act strange when I turn the 12v on. (maby the circuit it's adding 12v + 5v?) 24
24 -
Progress has been made
Full control from a webserver!
Very precarious though - motors are held in place by blue tack, but occasionally they break free and hit all the circuitry out of the way
Any thoughts on a better way of controlling it? (In terms of UI/UX)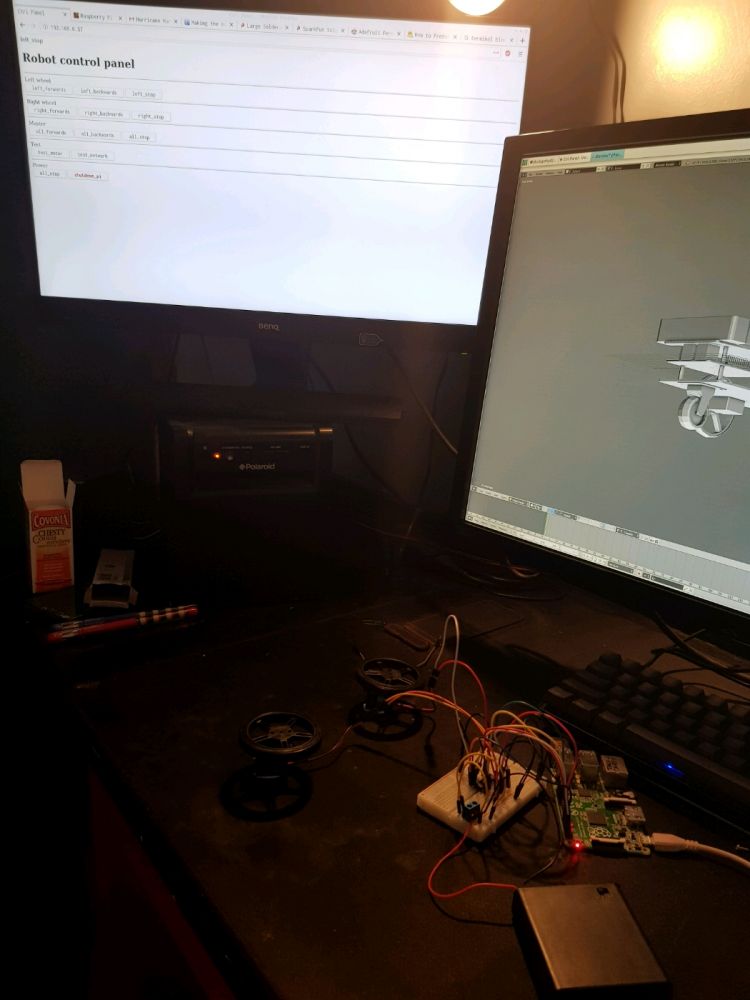 4
4 -
I went to the tech department at my school to get some solder and a few offcuts of wire, but some generous person gave me 6 raspberry pi's that he didn't need anymore! But that's not all, he also gave me 5 rangefinder sensors, 4 motors, a 4 digit 7segment display, a couple of sd cards, a few other various sensors, and some wires
Oh, and I got my solder, too :)4 -
Hey guys, I'm looking for small and cheap vibrators. One that you can use in an IOT project, the size of the ones in smart phones.
My searches on goggle are getting !work friendly results. Any ideas of a shop I can order some? Small miniature motors too.14 -
!rant
I can never get over this 😥
We were taught 5-6 subjects of electrical or mechanical engineering in out freshman year 😃 and our course is called "computer science and engineering".
We had ONE subject in the whole fucking year that was related to the course,called "introduction to computer"!!!!
The second semester of the freshman year had no subject remotely close to computers, but yeah we learnt about thermodynamics and beams and Trusses and motors and welding 😒.
They should have also told us what we are supposed to do with that knowledge 😒.
What's the point!!!!
Will is make us a mechanical engineer 😒?
Also have you forgotten we are here to learn about computers and not about the tension in the rope of the pulley 😒?
Also we have no subjects,in the 4 year course about actual development 😃 not even old school web development.
Fucking hate this shit20 -
3 hours making this beautiful circuit to test stepper motors.
Arduino nano + L293D + pot
Fucking bitch has a short circuit somewhere and can't find it out...
Made the same project in a breadboard in 15 minutes and it's working.
Fuck hardware bugs.
Cutted in the middle of all connections, took out excess solder... Nothing.
Fuck it, moving to the next ideia 20
20 -
Today I finished my robotics project. I had in my team a total idiot (the one who used the hidden divs, some might remember from another rant). I wanted to share with you the beginning of a ranting adventure.
Me: "you can begin with a simple task. I will send you the obstacle avoidance sensors values from Arduino, and you will send the data for the Arduino motors to dodge the obstacle".
The sensors give 1 if clear, 0 if obstacle is detected.
Below is his code (which I brutally rewrote in front of him).
Now, in the final version of the robot we have something like 9 sensors of the same time to work with.
Imagine what would have happened if we kept him coding. (Guess it: 2^9 statements! :D)
I was not that evil, I tried to give him some chances to prove himself willing to improve. None of them were used rightfully.
I'm so fucking glad we finished. I'm not gonna see him anymore, even if I'd like to be a technical interviewer for hiring just to demolish him.
I'm not always that evil, I promise (?)
Ps. He didn't even have any idea on what JSON is, even if we had already seen it during FIVE YEARS of computer engineering. (And should've known anyway if he had a bit of curiosity for the stuff he "studies") 10
10 -
Hey guys.
Arduino + Bluetooth + L293D + car Chacis and 4 DC motors.
Finaly finished my second bot/Drone.
Actually finished it yesterday but had lots of problems with hardware bugs (learned so fucking much in a day).
Tought I fucked two unos with bad soldering... No they are fine, just won't turn on in the circuit that was already working (was fine running the code).
Redone everything from scratch with a arduino uno, it's perfect now.
Funniest part is how I got my hands on a 50€ car kit for almost free... So some Chinese store sended this kit instead of some cheap stuff. Saved another arduino with the chip rack (that one that you can trade the atmega chip), I'll save it to program single chips. Plus a h bridge and lot lot more cool stuff.
Used only the Chacis.
Next: esp8266 and camera... And maby a gun? Would be cool 32
32 -
Recently I disassembled this Remington beard trimmer that I have, right. Thinking that I probably just depleted the battery or something like that, and that that's why the fucking thing would turn off after 10 seconds, with a miserable motor speed that could only be caused by what.. 2.5V or something like that? So I kept up with it for a while, and then a few days ago, I finally disassembled the fucking thing.
New 4.2V LiPo battery of my own attached, wicked! The thing has a 2Ah capacity and is fully charged, so fuck all in a big ship, I'ma shave my fucking hair without protection, who cares with 2Ah anyway, given that motors at 4.2V consume only 800-ish mA, right. So I shaved my head, and figured.. holy shit mate, I fucking beat this fucking cunt, fuck you Remington! Planned obsolescence my ass!!!
Just now @xewl sent me a request that made me reconsider this shaver. Some PS3 controller, should be easy enough to fix. But I referenced my shaver so I figured that I might actually check it beforehand.
The original fucking battery has 4V left on it. 4 fucking volts! That ain't gonna trip shit for an overdischarge protection circuit!!! WHY THE FUCK REMINGTON, WHY THE FUCK DID IT (IF ANYTHING) TRIP?! And more importantly, why did you make the motor turn for only 10-ish seconds after charging, 1 year after purchase, despite the fucking cell having 4 fucking volts in it, which is more than plenty to get the thing turning for at least a 60% charge?! Planned obsolescence perhaps, hmm?
But let's say that it was bad contacts or something like that. After all, my probing was a bit intermittent, showing 1.5V (if it's shorting, shouldn't it be in the mV range?) and then 4V at times, until I separated the nickel connectors from the 16500 cell. Why the fuck should that thing short, considering that it's unprotected?! The fucking cell is unprotected, and you Remington are going to let it short? What kind of fucking engineering is that, you fucking braindead morons?!!!
And why do you use a 16500 cell which isn't very standard over a 18650 cell, which is? Again, planned obsolescence? Fucking vile pieces of shit.
Now what's more.. I tried to power on the shaver for a picture for this fucking rant, using a LiPo cell of my own that I used to shave my hair with the other day, to get a nice picture of my little hack. But the fucking thing, despite having 3.89V left in it after that fucking shave, which is more than plenty for a lithium cell, the fucking unit doesn't power on. WHAT THE FUCK REMINGTON?!! That's planned obsolescence at its best, init?!! You vile fucking pieces of shit.
So I guess that this rant is no more one of "I beat these Remington cunts". It is one of "you can bet your fucking ass that planned obsolescence is a thing!!"7 -
*The Fearless Leader*
I get a call to check up on a robot that has been exceeding weight limits at certain points of its movement (Crashing). As I get to the pendant (robo-game controller thingy I like to call it) and look over the alerts and warnings I notice some oil around the main power box of the Robot.... Nothing around this has oil.. so I start looking around and it turns out that the issue wasn’t a crash at all! It was an oily shorted out wire that kept sparking mad heavy when that servo was called on.. causing a large servo failure that required a full restart of the power box. I called our fearless leader and showed him only to find out that there was a motor leaking oil from the electrical end... My fearless leader runs both the Maintenance and Robotics department. When the motor was eventually fixed we overheard the technicians say that our fearless leader knew about this a week ago and decided to leave it that way.... with oil... coming out of an electrical cable..... *sigh* well Anyway after all the wires were fixed and motors changed. He comes up to me and says that he can’t believe that I didn’t call maintenance and fill a report on negligence of technicians for failing preventative maintenance....
I lost my cool a little, firstly that’s not my job, I’m literally one of the lowest ranking here. I called my next in command to figure out what I should do. Secondly the technicians told me that you told them to leave it like that! So if this place caught on fire this would have been on you!
Later I found out that he was trying to fire a technician and wanted me to do the dirty work.. I’m not going to be the reason another man loses the means for him to feed his family. The technician is a pretty cool and fair guy too!
Our fearless leader was a forklift driver and has no experience in robotics or maintenance... I don’t know how this happens or even why but all I know is this man is running both departments to the ground and management loves him.....1 -
Blue Robotics
This company makes underwater thrusters for submarine applications. With their first thruster they made it easy to make a homemade submarine. The motor was powerful, the thruster just worked. They even had a promotional where they created an automated surfboard that made it from hawaii to somewhere in california with one of their thrusters pushing it there the entire way. It was a great product.
Then they created the next version. This was the same thruster, but it had an ESC(Electronic Speed Controller) sealed in an aluminum puck on top of the motor. This ESC could be controlled by servo controls, or by plugging it into an i2c bus. You could pull different stats off of the motor over i2c it sounded great. So my robotics team trusted this company and bought 8 motors at $220 - $250 bucks each. We lightly tested them since we had not even finished the robot yet. One week before the competition our robot got completely put together and we did our first few tests.
Long story short, Us and 22 other teams did roughly the same thing. We bought these motors expecting them to work, but instead the potted aluminum ESCs were found defective. Water somehow got into the completely resin sealed aluminum puck and destroyed the ESC. We didn't qualify that year due to trusting a competition sponsor to deliver a good product. I will admit that it was our fault for not testing them before going to the competition. Lessons were learned and an inherent distrust of every product I come across was developed. -
Not entirely dev related, but...
I'm getting tired of (electrical, mechanical) engineers complaining about HW limitations like "oh this board only has 12 KB of flash memory" or "I can't make this thing move smoother because my CPU is only 16 MHz" Bitch, you can spend $500 on 3 servo motors, but you can't afford to pay extra $5 to get a board with better specs to control them?7 -
CNC finished...
Can't do anything else (level it and such) until I get new motors...
the steppers I ordered one month ago returned back to China, FUCKKKKKK
one more month waiting.
So many project ideas.... nothing concrete.
What should I do now? Did my BT controlled car, the CNC, ... Any ideas?9 -
remember that trainwreck called nikola motors? You know nothing. I _knew_ you could create a supercomputer with HTML.
 4
4 -
New robot in development!
Much better than my old one:
- sturdier base/wheels further apart
- got a custom designed PCB printed for it
- 18V motors 2
2 -
For robotics I decided to write a program that would automatically tune a PID loop (a loop with three magic constants that tells you how much power to give the motors).
Being a high school student who hasn't been taught anything about the theory of PID loops or the right way to tune them, I had no clue what I was doing. So instead of actually learning the calculus to do it, I just made an evolutionary tuner that keeps guessing slight variations of the last-best three constants.
Basically, you press start and the robot spins in circles until you come back in 15 minutes.3 -
Recently bought an Adafruit Industries board which controls stepper motors over i2c. It has a Phython library, but my code is in C++. Decided to convert the Python code to C++ to get started quickly. Behold the magic line that made everything work:
std::this_thread::sleep_for(std::chrono::milliseconds(10));
I can't believe Python's ridiculous performance is being harnessed to let the field generated by electromagnets in a stepper motor to grow to sufficient proportions to affect movement. Without the said sleep(), the stepper motor just vibrates with my C++ code. Not sure if the library was created with Python's performance in mind, or they simply didn't think about back EMF in electromagnets...3 -
Writing a small program for my Pi, which has to have a gui, process rfid information and do some stuff with motors and leds.
Unfortunately I don't know c++, so I have to write this all in python.
Gui's in python are the ugliest pieces of shit ever. Even fucking c# winforms are prettier than them.
Currently using PyQt5 as it is the less ugly of the bunch but man, you'd think python would have a lot more ui options considering the love it receives...4 -
Niceeee.
Been receiving packages every day but today I good good shit..
Ideias for me to try?
4 relay module, 4 mostef board, finally the gears for the motors I'm scraping, and more mostefs. My mom is saying that I have the mailman for myself lol 2
2 -
If anyone has read any of my posts before you may know, they're usually of a certain... Shall we say, dark, nature?
Well this possibly represents one of the darkest things I've imagined (with regards to technology and programming) I've had.
I was asked if I want to be buried or cremated when I die and they seem so... Pedestrian and I thought long and hard about what would be a fitting way to honour my life and what to do with my remains and it came to me...
I want my flesh to be only partially treated with formaldehyde so chunks of me rot away and others don't.
I want my skeletal structure to be replace with titanium rods with actuators and servo motors where my joints would have been with an internal gyroscope to assist with balance and my corpse will be installed with some sort of IOT controller board with on board wifi.
The companion smart phone app will allow my partially rotting cybernetic zombie corpse to be driven around by a bored grave yard grounds keeper while kids are doing LSD pretending they're all that.
Make them really believe the apocalypse has begun and the dead have risen.
I could be a whole thing for future corpse disposal too.
"Smart corpses, for the loved one who will be more intelligent in death than they were in life."
Although that's probably a bit too harsh...7 -
So we were building this thing with a raspberry pi, a few sensors and a few motors but for some reason we could not interface a sensor with the pi (this is supposed to be trivial) so we interfaced it with an Arduino and had connected a pin on the Arduino to the Raspberry pi to alert the pi when the sensor reads something!
Not something we were proud of but we had time constraints and couldn't figure out how to make it work. Also, the thing we were building was just for a one time use so we thought it would be okay -
Is connecting your aurdino and motors that it'll drive (through a motor driver of course) to the same battery bad for the aurdino?
I mean those are small DC brushed motors, will the noise/fluctuatuons they generate harm the aurdino in the long run?11 -
GM sucks. (General Motors)
There HR sucks, can't call on booked time, for phone screening and wanted me after I applied for job 4 months ago. I still entertained them. But now, it has gone too far.
I am blacklisting GM for life. I will never ever work for them, unless they give me 1 Million per month1 -
Bought an Arduino and is finally able to learn how to make my software interact with custom hardware projects. Just wiring up a led and controlling it with software is amazing fun! Really looking forward to learning servos, motors etc.
Planning to make velocity sensitive midi drums with piezos in the future.4 -
Good for a laugh
https://youtu.be/onqh1BJ-Q3U
TL:DR: A balloon-suspended system of cables, motors, and pulleys capable of moving people, cargo, and cameras. Think of the possibilities!2 -
Ok so I have never really used motors before so I have no idea what I am doing, but I was wondering how to calculate how much weight a motor could move.
Say I have a trolley that weights ~300kg, and I attached a motor to each of its 4 wheels how would I calculate if it would move/what would be needed to move it, and how would I know the RPM of the motors. (Friction can be ignored and it would be on a flat surface)
Also, if I added 4 more motors to turn the wheels, since its just moving a small wheel and it wont be supporting the weight, could it be weaker than the other motors, or would the force that the wheel is experiencing from the trolleys weight effect the turning of the motor.1 -
The nice thing about my current side project is that I don't have to care at all about optimizing. It takes 5 seconds for the motors to do their thing and I spend 95% of that waiting even with my horribly slow (but easy to write) code.1
-
So for anyone else out there that is learning WPILib for FRC. If you ever use ctre/Phoenix motors (don't know if that's a rule) DO NOT EDIT <ctre/Phoenix.h> HOLY
-
One day I decided I wanted to build robots.
And not kidding the reason I wanted to build them was because I wanted someone interesting to talk to and stil not kidding I even fantasized about a robot girlfriend... Lame I know I think I was a lonely little guy back then, though even after 7 years or so it doesn't feel as though it's that long ago. Maybe because things didn't change that much. Which is worrying but it's not the topic so I will pass on that future-past worries bullcrapper. After learning how robots worked and what made them function so things gradually led up to me being more interested in machine learning applications and software. I learned Arduino at first, I think I still have some messy circuits and old arduinos around. I only finished one robot though and it couldn't even support it's own weight. The servo motors were taking too many amps that heated up the little arduino even with a fan attached. Provably I should have made use of mechanics for robots books and calculated things first. But even though it couldn't walk properly I still felt success and I loved it like my own kid (me taking it apart was questionable but believe me). After that I focused more on writing code than using my hands to make things which was a pain in the ass if I might add.
After learning arduino and making that failed project of mine. I then picked up C++ wrote hello world program usual things a starter would do. It was the language I wrote my first game which I finished and this time it worked. But I never released it which was partly because I didn't want to spend a hundred bucks on a license for the engine and I also knew that it was a shit game. If I were to describe; lines in different colors come from the top you need to hit the lines with the same colored columns to break them. The columns changed their height and location on random. The lines sped up and gap between them decreased. Now that I think about it it wasn't half bad. But the code was written in game maker studio's version of C so I have no way to salvage it.
But I learned a lot of things from that project and that was the goal, so I would call it a win. I don't remember but after sometime I switched to python. And I'm glad I did, it's fun to code in which was the main reason I coded in the first place. Fun.
Life happens and time passes,
Now I'm waiting to enter college exams in a few months after hopefully passing them. My goal is to get into computer engineering which will be extremely challenging because it's the highest point department in the university I'm aiming at. But hey if the challenge is great the reward is greater right ? To be honest I'm still not sure about my career path. Too many choices. So I will just let my own road called <millions of similarly random events that are actually caused by deterministic reactions, to affect you and your surroundings leading up to a future which only the Laplace's demon can forsee> guide me. Wish me luck.1 -
Bleh, I fucking hate Arduino. I thought this Chad would teach me assembly for PCs, not Arduino. The boards don't fucking work half the time, I don't give a shit about blinking lights or motors, I don't want to do things with robotics, I just want to fucking code. Ffs, I'd rather write code that just makes a number increment and then quits, because then I wouldn't have to use that useless fucking Arduino "IDE".
Fuck you Arduino, fuck you so much.4 -
Visit Your Local Citroen showroom in Ahmedabad to experience the New Citroen C3 in 2025
Step inside the new Citroën C3 and discover a compact car that feels just right for city drives. Visit Magnus Motors in Ahmedabad, and check out its bold design, practical space, and easy handling. Get behind the wheel, ask your questions, and let the experience help you decide. Test drives are open now.
-
CODER CYBER SERVICES // CRYPTOCURRENCY RECOVERY ASSOCIATION
I’m the owner of Prestige Motors UK, a well-established car showroom based in the UK. We specialize in high-end vehicles and pride ourselves on delivering the best customer service. One day, I found a listing for a 2019 Mercedes-Benz S-Class at an unbelievably low price. The dealership appeared legitimate, with professional photos, positive reviews, and all the signs of a trustworthy business. After several email exchanges and phone calls, I decided to go ahead and pay £26,000 for the car, believing it was a fantastic deal. However, after transferring the money, things quickly went south. The seller disappeared. The website vanished, the phone number was disconnected, and all my attempts to contact them were met with silence. It became clear that I had been scammed, and the car was never going to be delivered. Losing £26,000 was a massive blow to my business, and I felt completely helpless. While scrolling through a Facebook community for car dealers, I came across a post from another dealer who had been scammed in a similar way. They recommended Coder Cyber Services, sharing how the team had helped them recover their money. After reading their positive review, I decided to reach out for help. The team at Coder Cyber Services responded quickly. They immediately began investigating, using advanced tracking tools to trace the digital footprints left by the fraudulent dealership. Their experts were able to identify IP addresses linked to the scam and cross-referenced the information with known fraud cases in the country. Within a few weeks, Coder Cyber Services had gathered enough evidence to file a formal complaint with law enforcement. They worked closely with the authorities to track down the scammers. Thanks to their efforts, I was able to recover the full £26,000.I can’t express how relieved I was. Coder Cyber Service’s professionalism and expertise made the entire process much smoother than I had anticipated. Without their help, I would have faced a significant financial loss, which could have devastated my business. Their support not only helped me recover my money but also ensured the perpetrators were brought to justice. Finding Coder Cyber Services through that Facebook community truly saved me, and I highly recommend their services to anyone dealing with online scams.
I would recommend their services without any doubt:
Whatsapp: +1 (672) 648-1781
Thank you. 1
1 -
What are the parts of the CNC Wire Bending Machine?
A CNC wire bending machine is a complex piece of equipment used to bend the wire into various shapes and configurations with precision. It consists of several key parts and operates based on the instructions provided by a computer program. Here are the main parts of a CNC wire-bending machine and an overview of how it works:
1. Wire Feeding Mechanism:
This part of the machine is responsible for feeding the wire from a coil or spool into the bending area.
Wire feeding mechanisms can include rollers, pulleys, or servo-driven motors that control the wire's movement.
2. Straightening Unit:
- Before bending, the wire may pass through a straightening unit, which ensures that the wire is free from kinks and bends.
- This step helps produce precise bends by starting with a straight wire.
3. Bending Head and Tooling:
- The bending head contains the tools and dies needed to shape the wire.
- Tooling includes various components such as clamps, rollers, and mandrels that hold and shape the wire according to the desired design.
4. Guide Rollers and Pulleys:
- These components help guide the wire through the bending process, ensuring it follows the correct path and angles.
5. Control Panel or Interface:
- CNC wire bending machines are typically equipped with a control panel or computer interface.
- Operators input the design specifications, such as bend angles, lengths, and shapes, through this interface.
6. Computer Control System:
- The heart of the CNC wire bending machine is its computer control system.
- It interprets the design specifications and converts them into precise movements and commands for the machine.
- CNC software programs are used to create and store the bending instructions.
7. Servo Motors and Actuators:
- These components are responsible for moving the bending head, tooling, and other parts of the machine with high precision.
- Servo motors and actuators receive commands from the control system to carry out specific movements.
8. Sensors and Feedback Mechanisms:
- Sensors placed throughout the machine monitor various parameters, such as wire position, tension, and tooling alignment.
- Feedback from these sensors allows the machine to make real-time adjustments, ensuring accuracy and quality in the final product.



























Top Tags
Weekly Rant
View